Boxi Xia
Postdoctoral Researcher | Duke University | Legged Robotics & Machine LearningI build robots that learn to act in the physical world, from the mechanical hardware up through sim-to-real reinforcement learning. My focus spans humanoids, quadrupeds, soft robots, and generative AI for robot design. I hold a Ph.D. from Columbia University (advised by Prof. Hod Lipson) and am a postdoctoral researcher at Duke University in the General Robotics Lab, advised by Prof. Boyuan Chen.
News
2026
Argus paper published in Science Robotics — dynamic symmetry enables orientation-invariant locomotion in a 20-leg spherical robot.
Sep 2025
Duke Humanoid accepted at IROS 2025 — passive dynamics RL reduces cost of transport by 31% on real hardware.
May 2025
Text2Robot published at ICRA 2025 — generative AI designs and manufactures walking quadrupeds from text descriptions.
2025
Named inventor on Duke University provisional patent DU8960PROV (Argusbot).
Selected Publications
IROS 2026
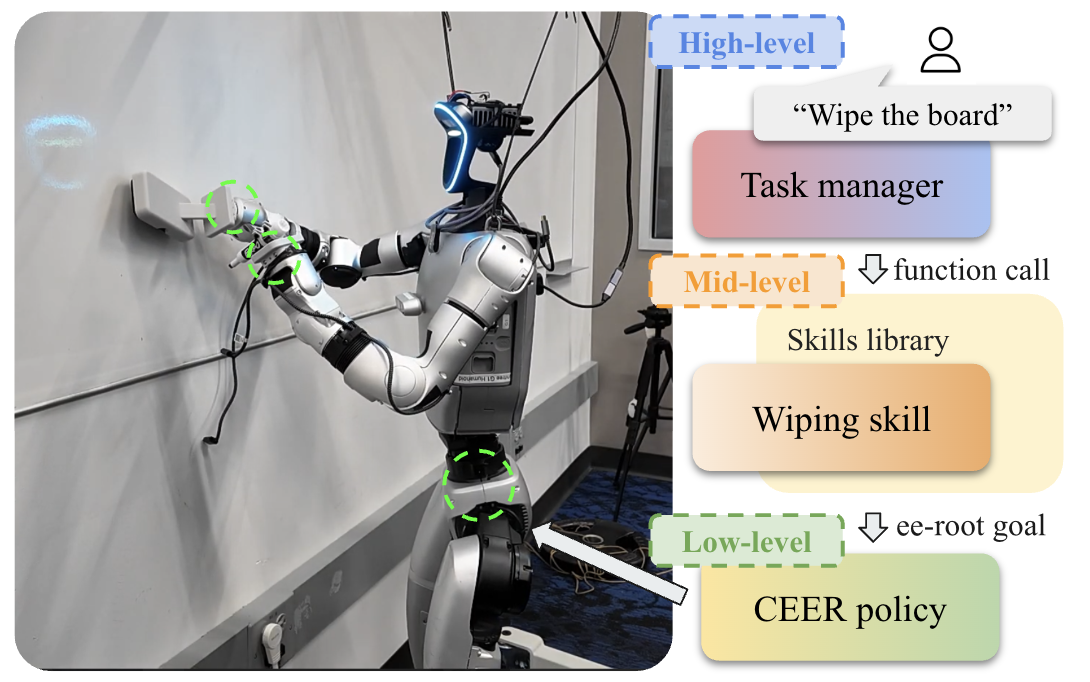
CEER: Compliant End-Effector and Root Control as a Unified Interface for Hierarchical Humanoid Loco-Manipulation
We propose CEER, a compliant end-effector–root (EE-root) control abstraction for modular humanoid loco-manipulation within a hierarchical planning framework. CEER enables compliance-aware whole-body control in an interpretable task space defined by root motion commands and end-effector pose targets, and supports plug-and-play integration with heterogeneous high-level planners. Experiments in simulation and on hardware demonstrate 3.3 cm end-effector tracking accuracy with substantially reduced jerk, stable contact-rich manipulation under teleoperation, and up to 70% success in simulated single-object loco-manipulation tasks within a room-scale environment.
Science Robotics
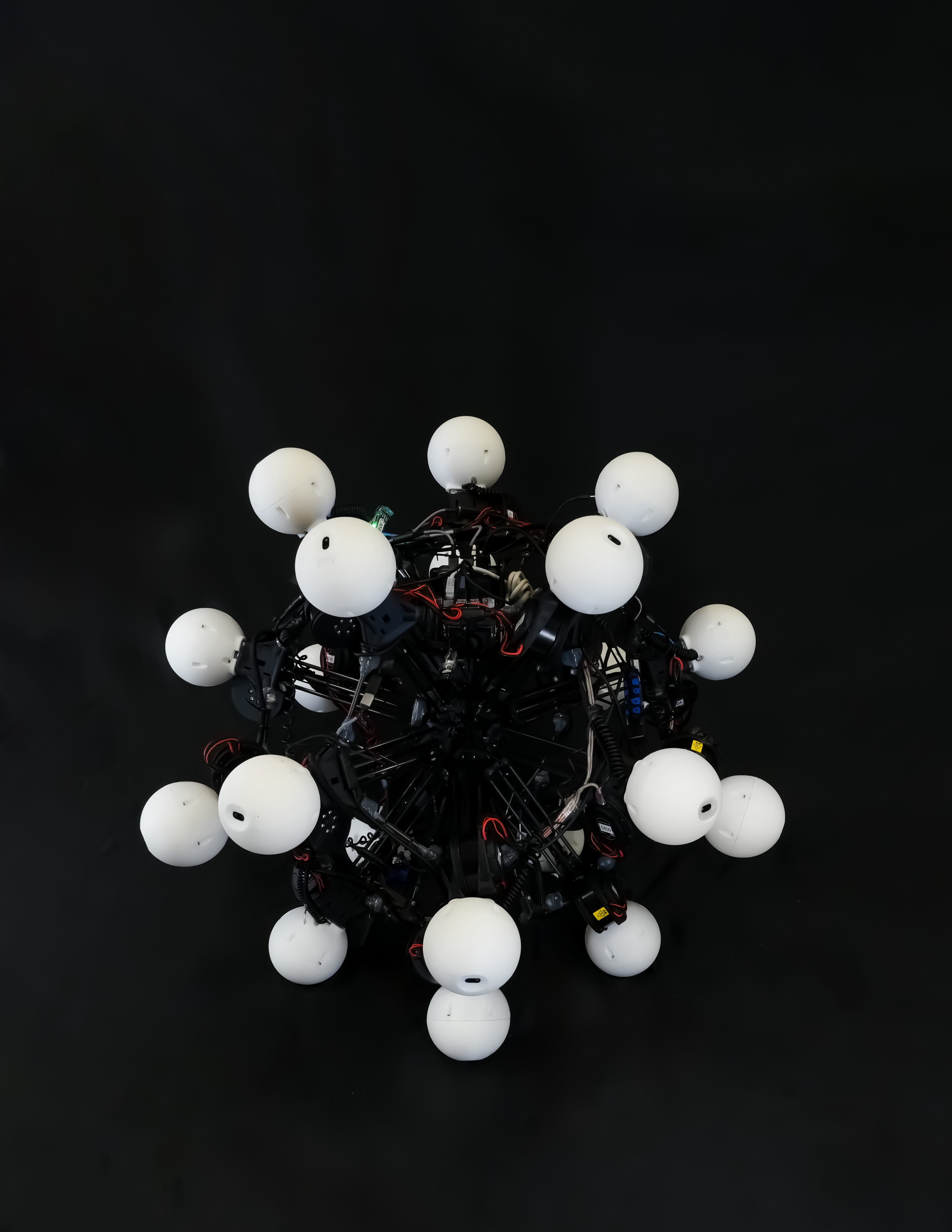
Extreme dynamic symmetry enables omnidirectional and multifunctional robots
We introduce dynamic symmetry — the uniformity of a robot's attainable center-of-mass accelerations — and show that maximizing it consistently improves trajectory tracking, robustness, and energy efficiency across 1,000+ simulated morphologies. We build Argus, a 20-leg spherical robot achieving near-extreme dynamic isotropy, demonstrating orientation-invariant locomotion, agile terrain traversal, and resilience to partial actuator failures.
IROS 2025
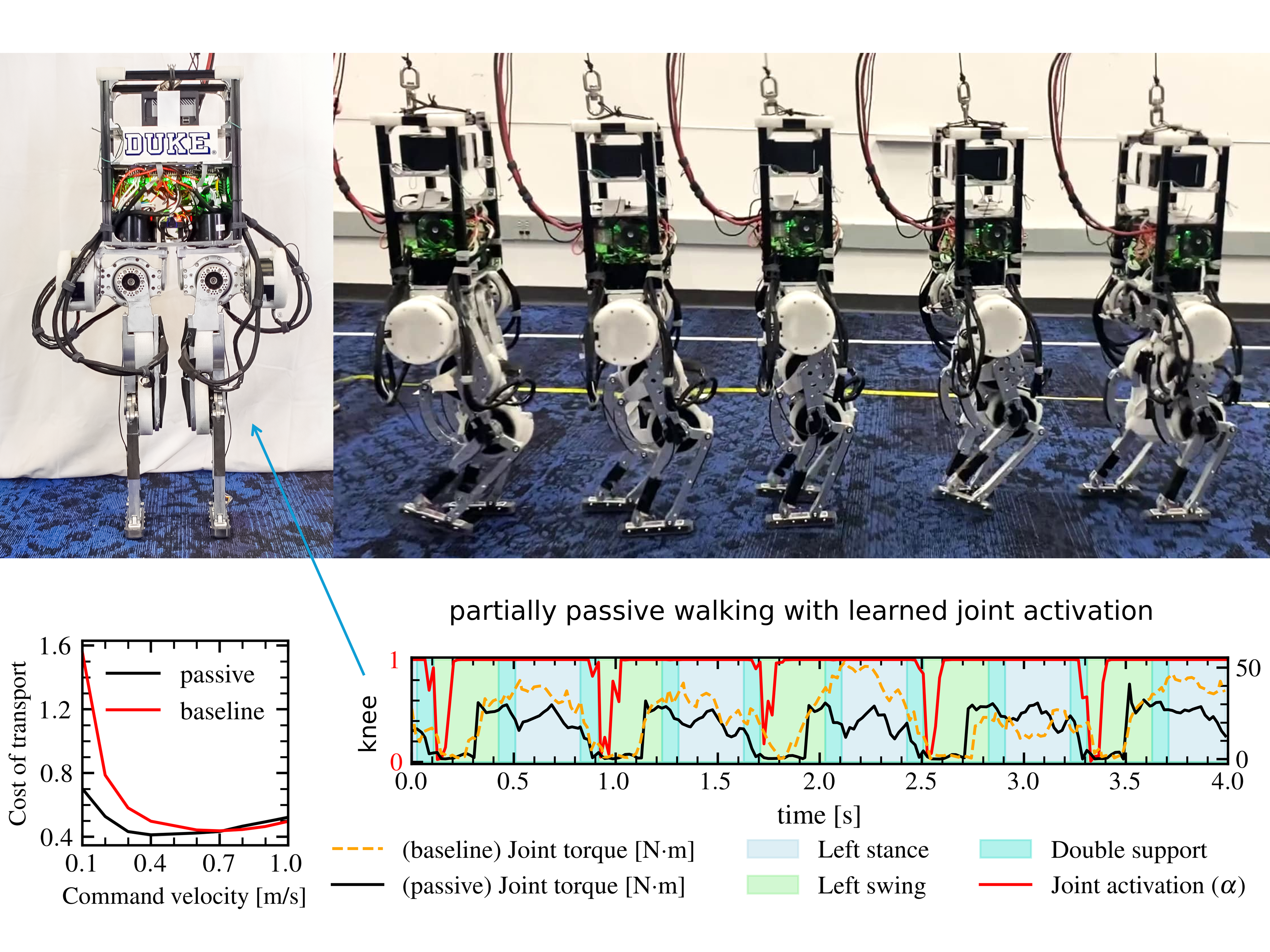
The Duke Humanoid: Design and control for energy-efficient bipedal locomotion using passive dynamics
We present the Duke Humanoid, an open-source 10-DOF child-sized bipedal robot designed for energy-efficient locomotion using passive dynamics. We develop a reinforcement learning policy deployable zero-shot on hardware for velocity-tracking walking, and propose an end-to-end RL algorithm that encourages passive dynamics — reducing cost of transport by up to 50% in simulation and 31% in real-world tests.
ICRA 2025
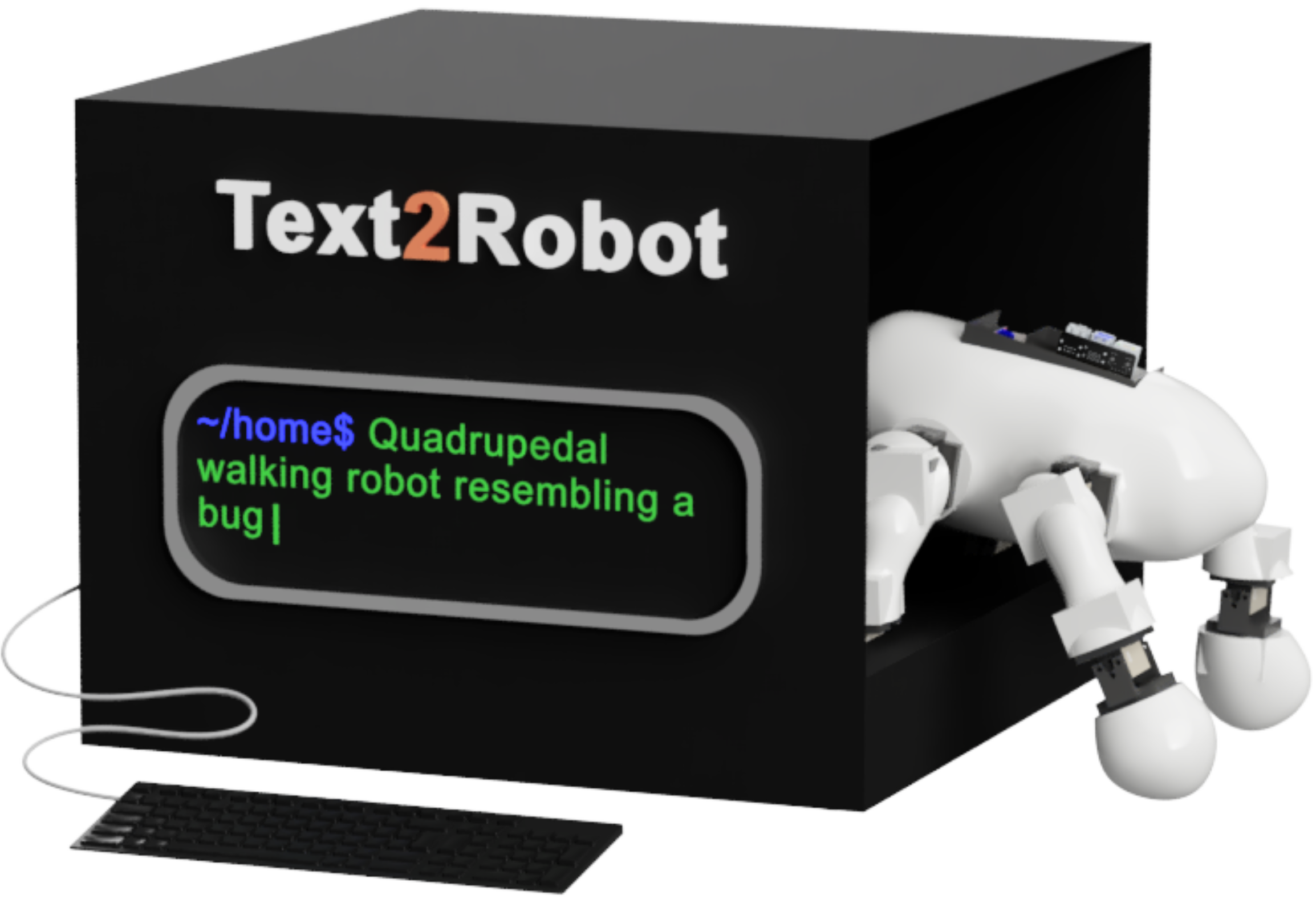
Text2Robot: Evolutionary robot design from text descriptions
Text2Robot converts user text descriptions into physical quadrupedal robots. Within minutes, text-to-3D models initialize diverse morphologies; within a day, geometric processing and body-control co-optimization produce a walking robot that accounts for real-world electronics and manufacturability. The framework enables rapid prototyping and opens new opportunities for generative robot design.
ICRA 2021
A legged soft robot platform for dynamic locomotion
We present Flexipod, an open-source untethered quadrupedal soft robot platform for dynamic locomotion. The robot is 80 vol.% soft with 3D-printed gyroid-infill flexible legs that passively stabilize on multi-terrain environments. With gaits tuned in a CUDA-accelerated soft-body simulator, the real robot achieves 0.9 m/s (2.5 body lengths/sec) — faster than most untethered legged soft robots — and can execute backflips.