Publications
Abstract
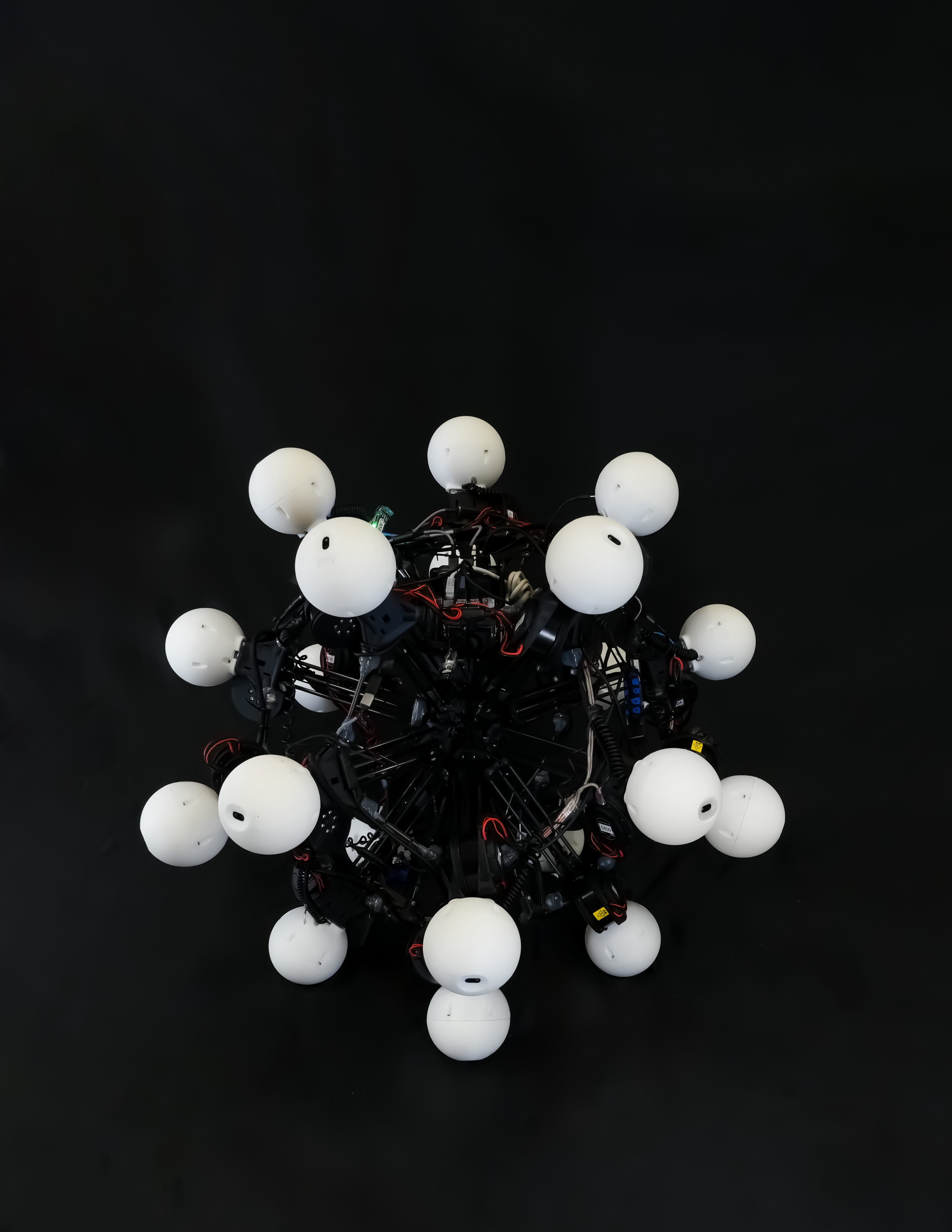
We introduce dynamic symmetry — the uniformity of a robot's attainable center-of-mass accelerations — and show that maximizing it consistently improves trajectory tracking, robustness, and energy efficiency across 1,000+ simulated morphologies. We build Argus, a 20-leg spherical robot achieving near-extreme dynamic isotropy, demonstrating orientation-invariant locomotion, agile terrain traversal, and resilience to partial actuator failures.

Abstract
Adding 8 wt.% diamond nanoparticle filler increases the thermal conductivity of silicone/ethanol soft actuators from 0.190 to 0.212 W/mK, improving actuation speed and cycle count without affecting mechanical properties. An LSTM neural network successfully predicts actuation force in multi-cyclic experiments, enabling computational modeling of long-term actuator behavior.
Abstract
We present a multimaterial printer and associated processes for in situ fabrication of silicones and silicone-based elastomer composites for soft actuators. Rheological study reveals conditions for continuous 3D printing of silicone rubber and silicone/ethanol composite. Anisotropic mechanical properties enable design of functional characteristics by print modality, demonstrating single-job additive manufacturing of multimaterial soft actuators.
Abstract
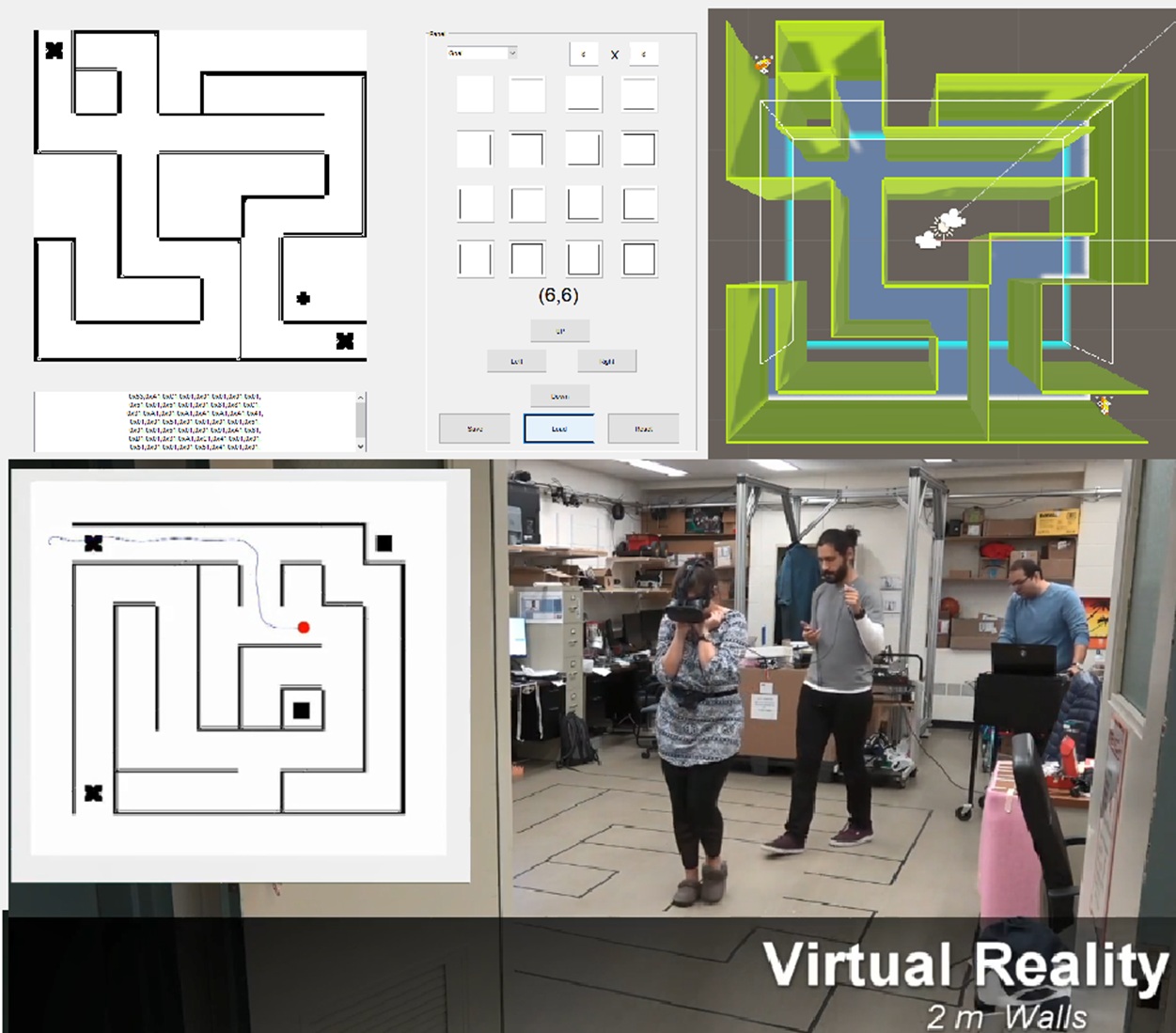
We developed a virtual reality version of the floor maze test (VR-FMT) to assess spatial navigation in 55 healthy adults across real and virtual environments, with and without maze walls. Results show the VR-FMT provides an ecologically valid assessment of spatial navigation that correlates with executive function measures, offering potential for early detection of cognitive and navigational deficits.
Abstract
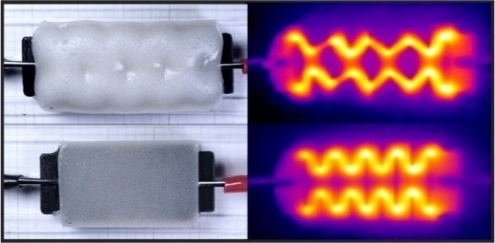
We examine electrically conductive fabrics as Joule heaters for silicone/ethanol heat-activated soft actuators. A stretchable kirigami-based Thermionyx fabric design withstands up to 195 °C and 30 W, enabling cyclic heating to 80 °C and linear actuation strain exceeding 30% — superior to traditional Ni-Cr wire coils and suitable for diverse thermally-driven robotic applications.
Abstract
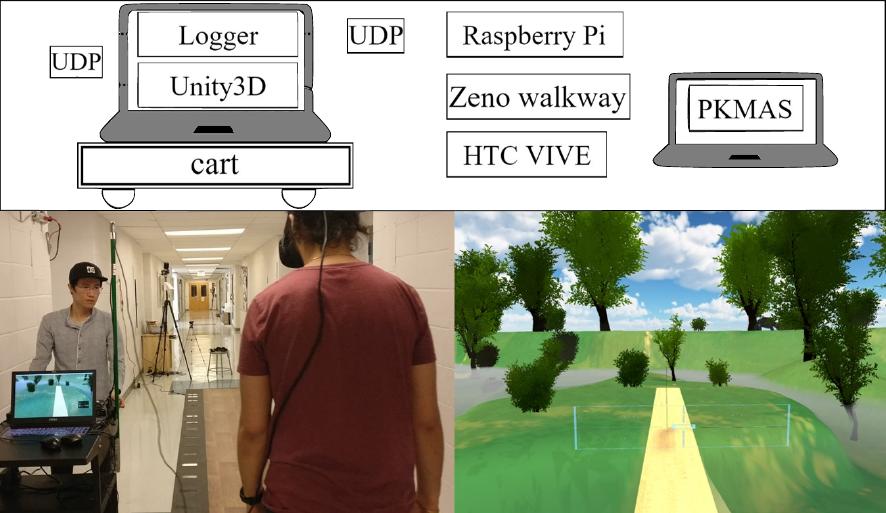
Twelve healthy adults walked overground in a virtual environment with continuous multidirectional visual-field perturbations via a VR headset. Participants took shorter strides with higher variability; medio-lateral perturbations caused greater effects than antero-posterior ones. Over time, participants adapted by increasing stride length and reducing variability — providing first evidence of visuomotor adaptation during overground walking with a VR headset.
Abstract
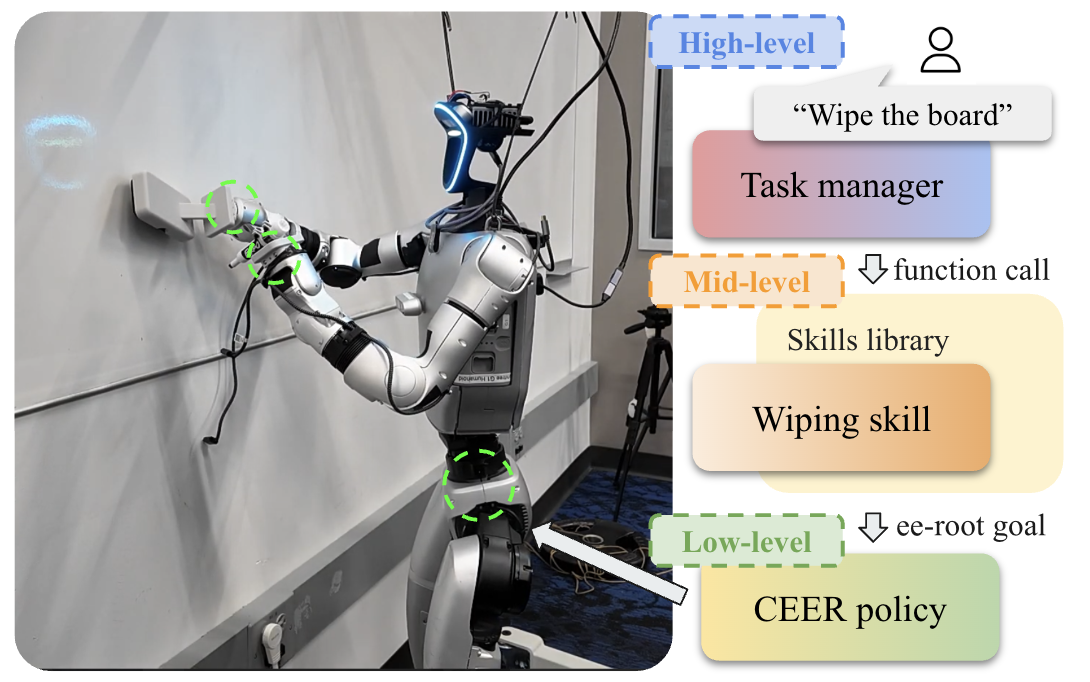
We propose CEER, a compliant end-effector–root (EE-root) control abstraction for modular humanoid loco-manipulation within a hierarchical planning framework. CEER enables compliance-aware whole-body control in an interpretable task space defined by root motion commands and end-effector pose targets, and supports plug-and-play integration with heterogeneous high-level planners. Experiments in simulation and on hardware demonstrate 3.3 cm end-effector tracking accuracy with substantially reduced jerk, stable contact-rich manipulation under teleoperation, and up to 70% success in simulated single-object loco-manipulation tasks within a room-scale environment.
Abstract
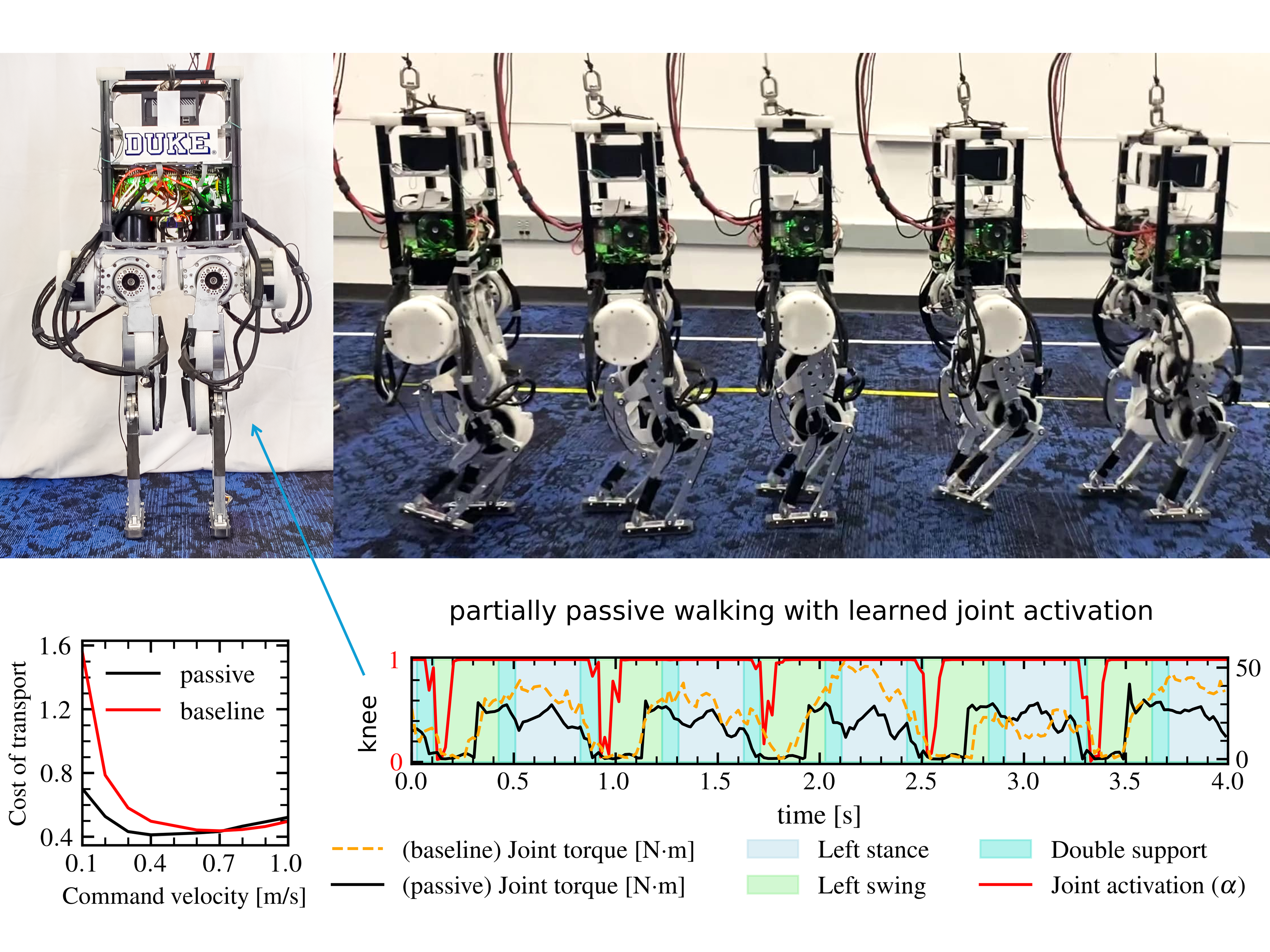
We present the Duke Humanoid, an open-source 10-DOF child-sized bipedal robot designed for energy-efficient locomotion using passive dynamics. We develop a reinforcement learning policy deployable zero-shot on hardware for velocity-tracking walking, and propose an end-to-end RL algorithm that encourages passive dynamics — reducing cost of transport by up to 50% in simulation and 31% in real-world tests.
Abstract
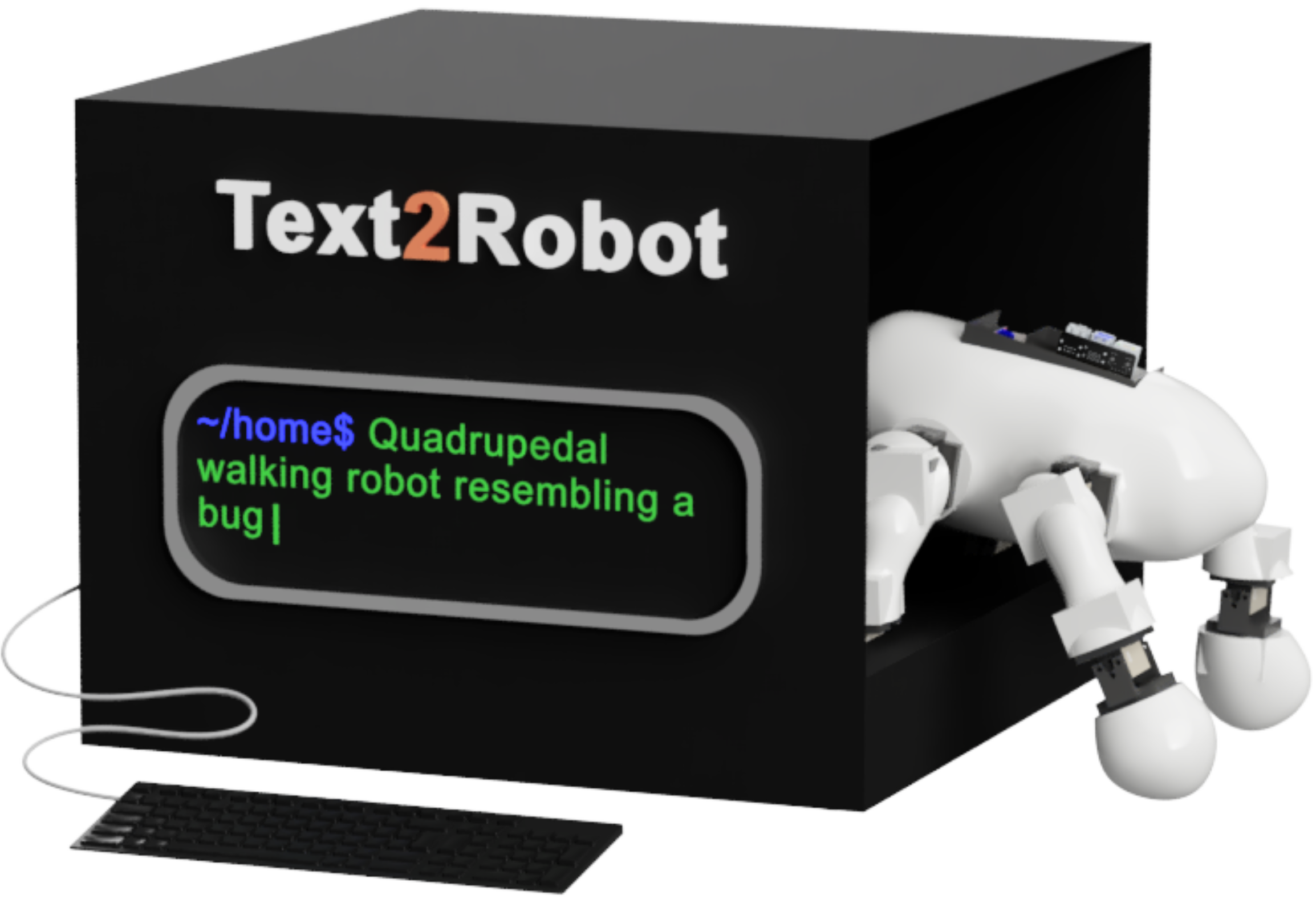
Text2Robot converts user text descriptions into physical quadrupedal robots. Within minutes, text-to-3D models initialize diverse morphologies; within a day, geometric processing and body-control co-optimization produce a walking robot that accounts for real-world electronics and manufacturability. The framework enables rapid prototyping and opens new opportunities for generative robot design.
Abstract
We present Flexipod, an open-source untethered quadrupedal soft robot platform for dynamic locomotion. The robot is 80 vol.% soft with 3D-printed gyroid-infill flexible legs that passively stabilize on multi-terrain environments. With gaits tuned in a CUDA-accelerated soft-body simulator, the real robot achieves 0.9 m/s (2.5 body lengths/sec) — faster than most untethered legged soft robots — and can execute backflips.