




Abstract
This paper presents an open-source untethered quadrupedal soft robot platform for dynamic locomotion (e.g., high-speed running and backflipping). The robot is mostly soft (80 vol.%) while driven by four geared servo motors. The robot’s soft body and soft legs were 3D printed with gyroid infill using a flexible material, enabling it to conform to the environment and passively stabilize during locomotion in multi-terrain environments. In addition, we simulated the robot in a real-time soft body simulation. With tuned gaits in simulation, the real robot can locomote at a speed of 0.9 m/s (2.5 body length/second), substantially faster than most untethered legged soft robots published to date. We hope this platform, along with its verified simulator, can catalyze agile soft robots’ development.
Paper Video
Material
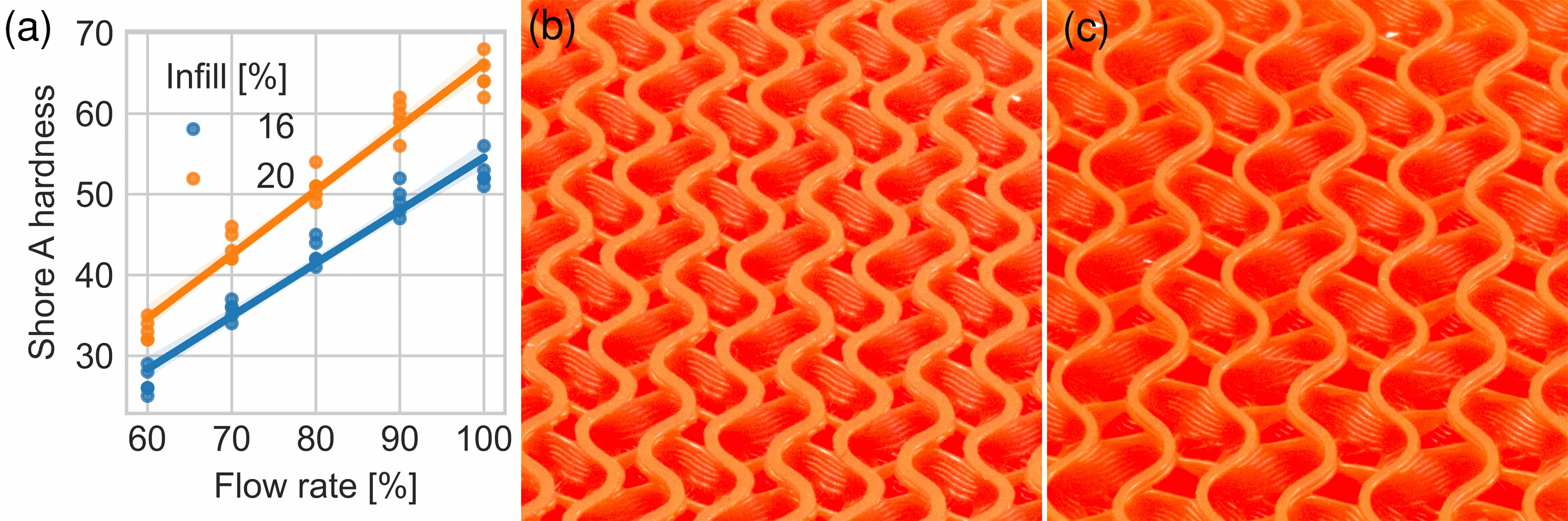
The flexible material used for printing the soft body and legs is a flexible TPU (Cheetah flexible filament, Ninjatek). Although the filament has a shore hardness of 95A, it is possible to achieve lower hardness by varying the infill density and flow rate.
Body Design
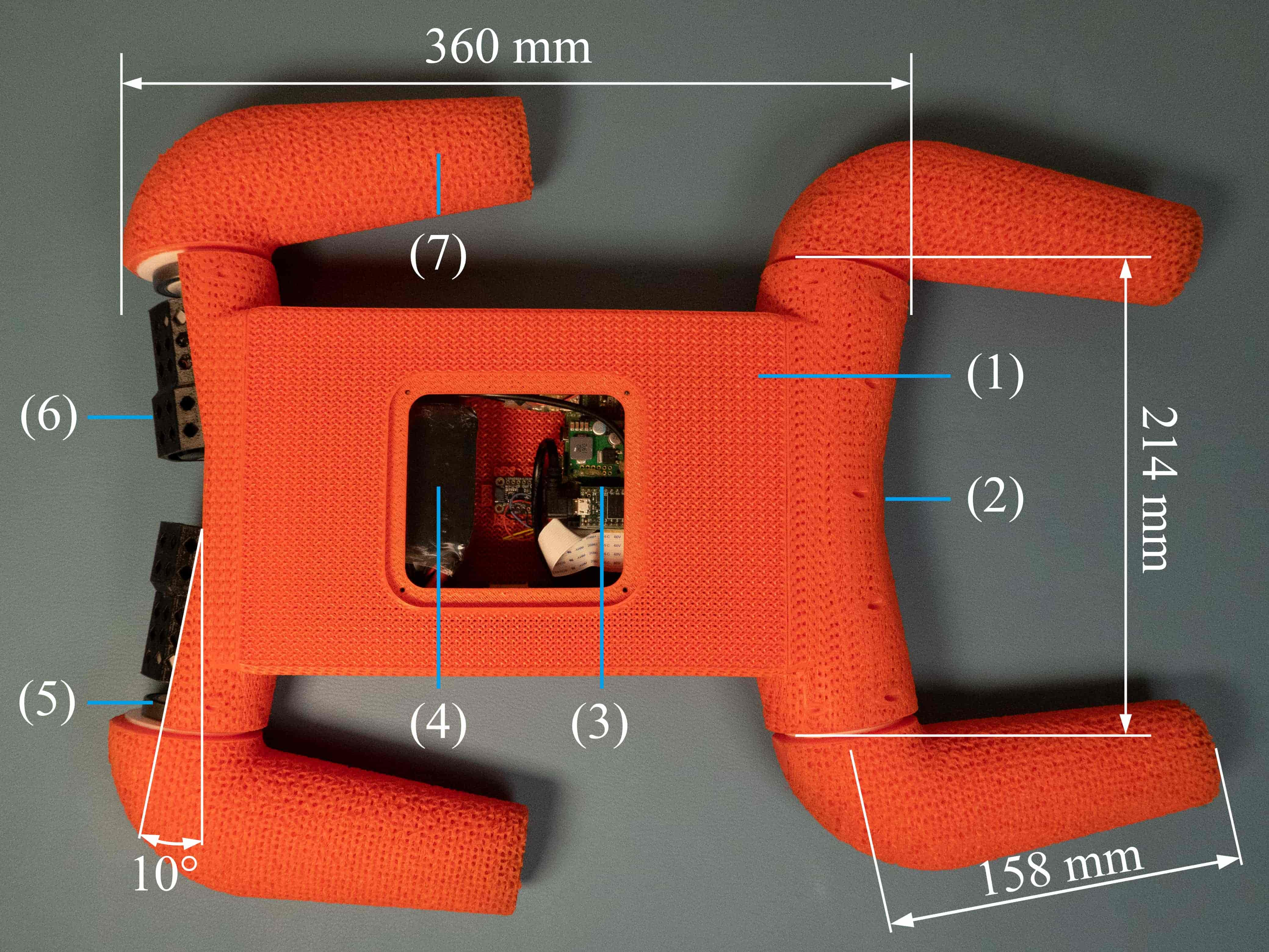
The body is printed with flexible material. 96 vol.% of the 3D printed parts are soft, making the robot 80 vol.% soft overall.
Soft Leg
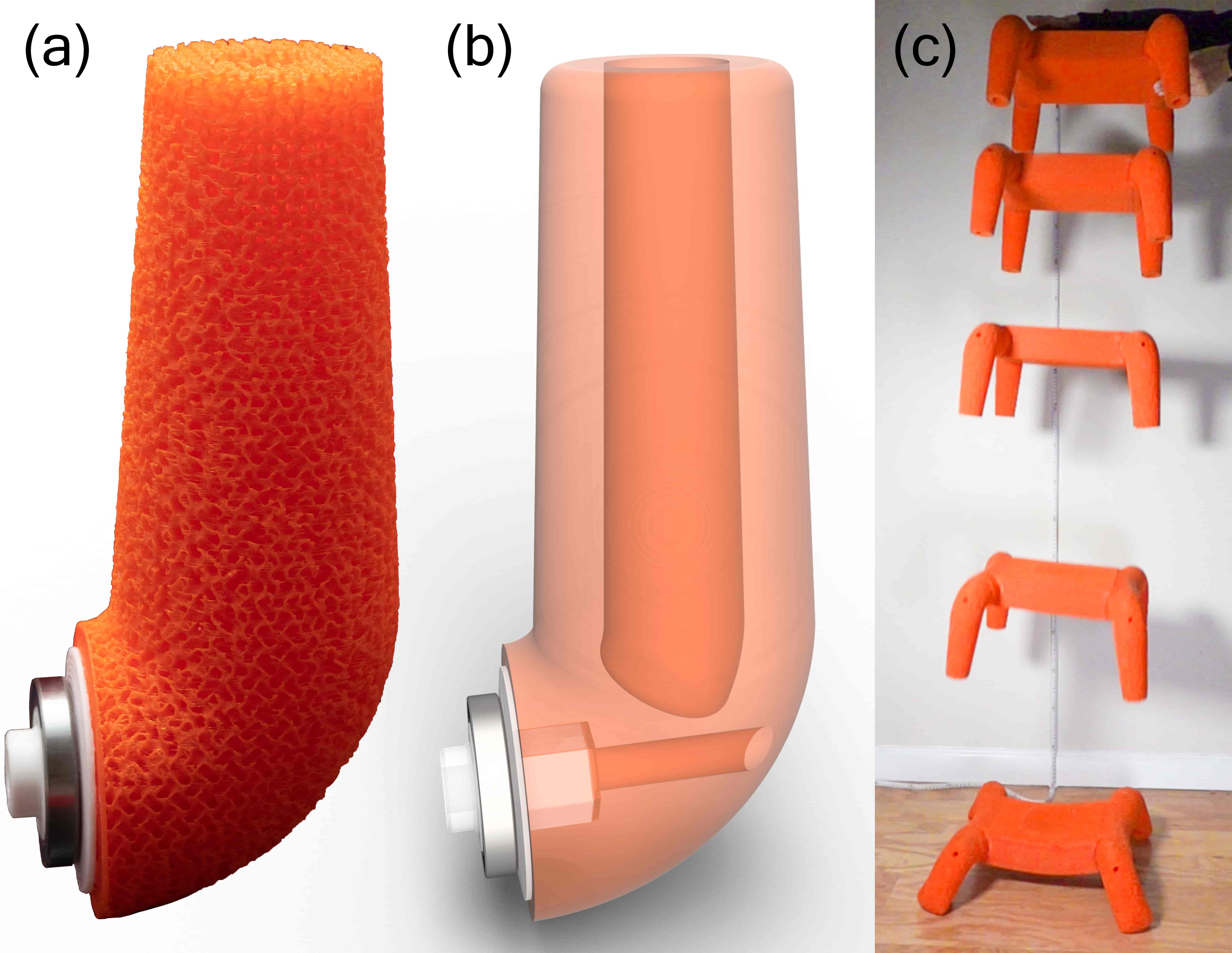
The leg’s hollowed structure makes it flexible and impact resistant. To demonstrate its damping effect, we dropped the Flexipod from as high as 2.0 m. At impact, the soft legs compressed and the body bent inward to absorb the impact, allowing the robot to recover on its own.
Simulation
We developed a soft robot simulation environment based on Titan — a CUDA-accelerated massively parallel asynchronous spring-mass simulation library. We extended Titan with a rotational kernel for contact-coupling of soft bodies. The Flexipod simulation achieved 10⁹ spring evaluations per second on a consumer Nvidia 2080Ti GPU.
Locomotion Patterns

Backflips
Locomotion in the Wild
Links
People
Boxi Xia, Jiaming Fu, Hongbo Zhu, Zhicheng Song, Yibo Jiang, Hod Lipson
Creative Machines Lab at Columbia University
Paper
Citation
| |