Robot design has traditionally been costly and labor-intensive. Despite advancements in automated processes, it remains challenging to navigate a vast design space while producing physically manufacturable robots. We introduce Text2Robot, a framework that converts user text specifications and performance preferences into physical quadrupedal robots. Within minutes, Text2Robot can use text-to-3D models to provide strong initializations of diverse morphologies. Within a day, our geometric processing algorithms and body-control co-optimization produce a walking robot by explicitly considering real-world electronics and manufacturability. Text2Robot enables rapid prototyping and opens new opportunities for robot design with generative models. Our website is at http://generalroboticslab.com/Text2Robot/.
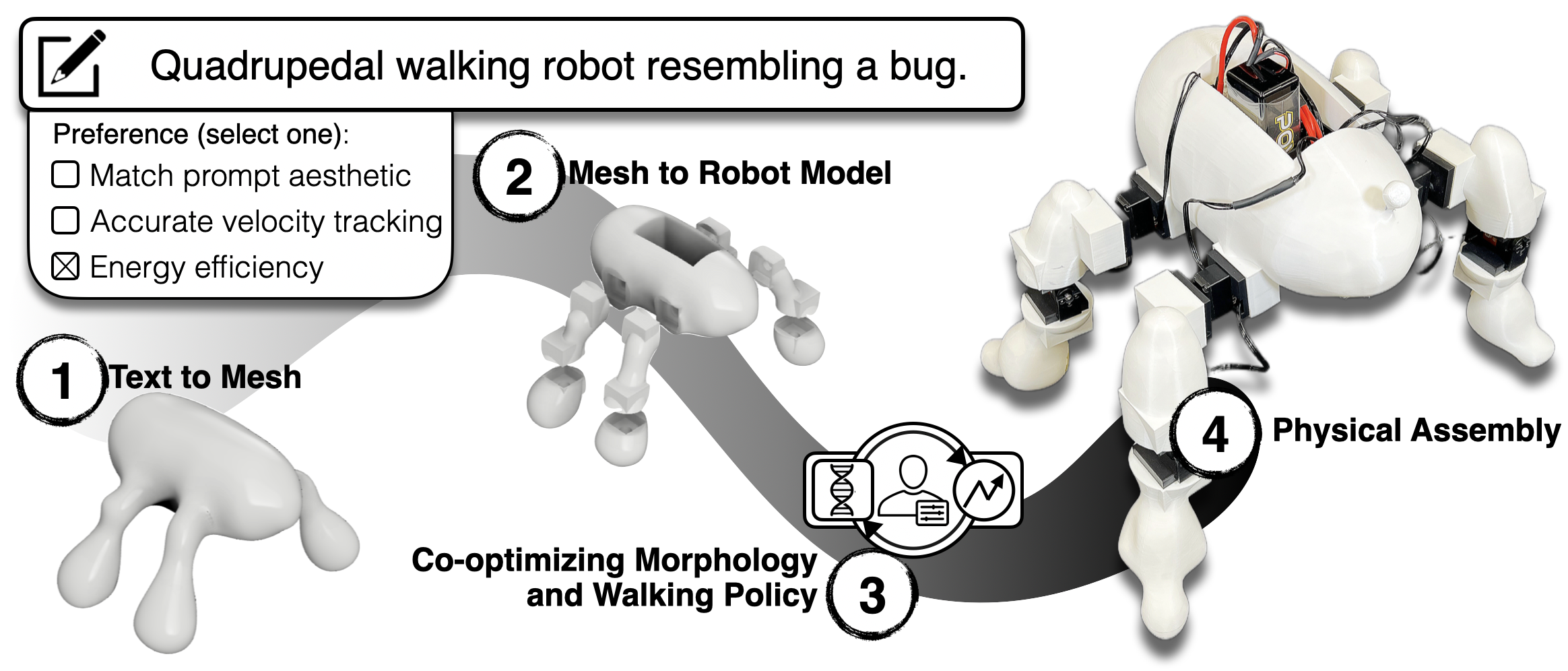
Overview of the four steps in the Text2Robot framework: (1) text-to-3D mesh generation, (2) geometric processing into kinetic robot model, (3) evolutionary co-optimization of morphology and policy, (4) physical fabrication and assembly.
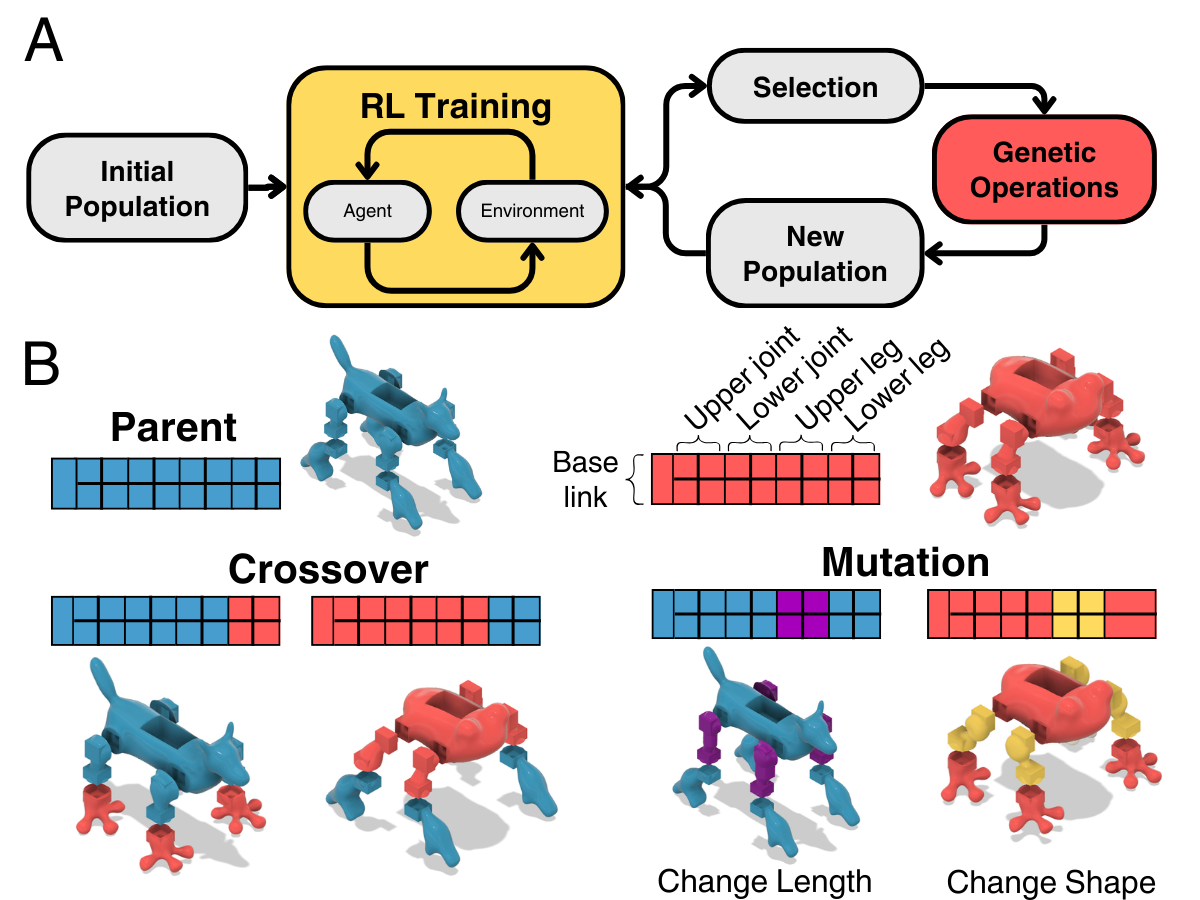
Morphology and Walking Policy Co-optimization. (A) The inner loop implements reinforcement learning to optimize the robot control policy; the outer loop optimizes robot morphologies through genetic operations. (B) Genetic representation and examples of crossover and mutation.
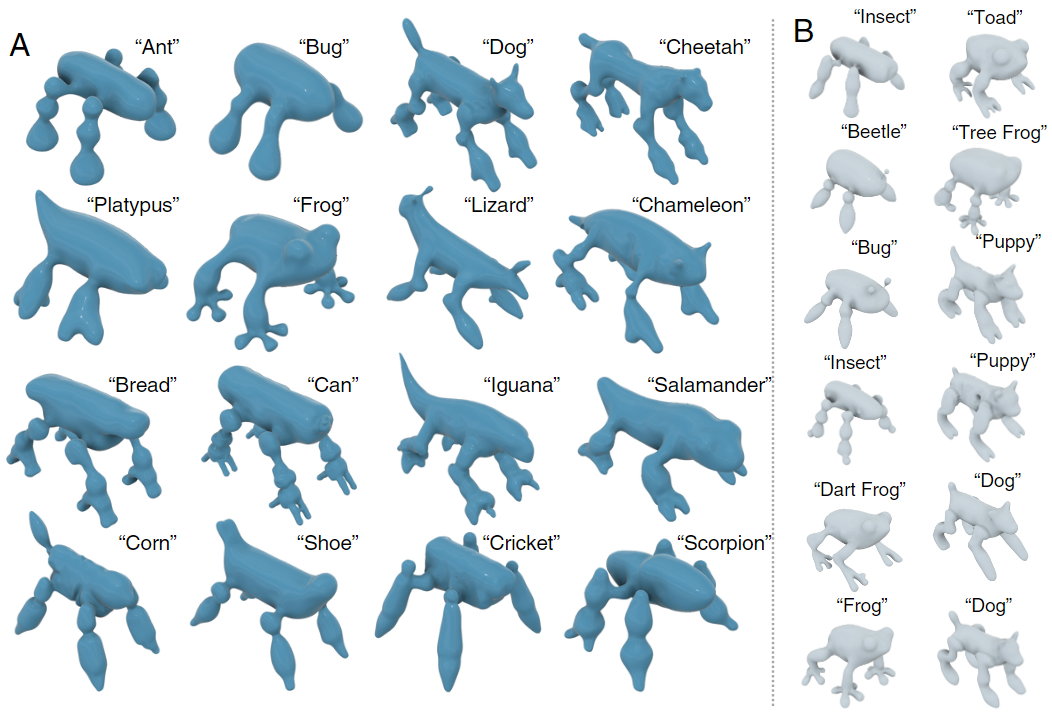
Generated Meshes and Corresponding User Descriptions. (A) Sixteen robot mesh models generated from diverse user text descriptions. (B) Morphology variants for bug, frog, and dog robots generated from similar prompts.
@inproceedings{ringel2025text2robot,title={Text2Robot: Evolutionary robot design from text descriptions},author={Ringel, R.P. and Charlick, Z.S. and Liu, J. and Xia, B. and Chen, B.},booktitle={2025 IEEE International Conference on Robotics and Automation (ICRA)},pages={5789--5797},year={2025},organization={IEEE}}